mirror of
https://github.com/ben1234560/k8s_PaaS.git
synced 2025-04-21 21:15:53 +08:00
Update Kubernetes调度机制.md
This commit is contained in:
parent
56f32d38fd
commit
350ce84cf3
@ -137,4 +137,122 @@ spec:
|
||||
|
||||
这样,该Pod就会绑定在2个独占的CPU核上,具体是哪两个CPU,由kubelet 分配
|
||||
|
||||
基于上面的情况,建议将DaemonSet(亦或者类似的)的 Pod 都设置为 Guaranteed 的 QoS 类型,否则一旦被资源紧张被回收,又立即会在宿主机上重建出来,这样资源回收的动作就没有意义了
|
||||
基于上面的情况,建议将DaemonSet(亦或者类似的)的 Pod 都设置为 Guaranteed 的 QoS 类型,否则一旦被资源紧张被回收,又立即会在宿主机上重建出来,这样资源回收的动作就没有意义了
|
||||
|
||||
|
||||
|
||||
### Kubernetes默认的调度策略
|
||||
|
||||

|
||||
|
||||
> 调度机制的工作原理示意图
|
||||
|
||||
**默认的几种调度策略:**
|
||||
|
||||
1. **第一种类型,GeneralPredicates:**这一组过滤规则,负责的是最基础的调度策略,计算的就是宿主机的 CPU 和内存资源等是否够用。
|
||||
2. **第二种类型,与 Volume 相关的过滤规则:**这一组过滤规则,负责的是跟容器持久化 Volume 相关的调度策略。
|
||||
3. **第三种类型,是宿主机相关的过滤规则:**这一组规则,主要考察待调度 Pod 是否满足 Node 本身的某些条件。比如,PodToleratesNodeTaints,负责检查的就是我们前面经常用到的 Node 的“污点”机制。
|
||||
4. **第四种类型,是 Pod 相关的过滤规则:**这一组规则,跟 GeneralPredicates 大多数是重合的。而比较特殊的,是 PodAffinityPredicate。这个规则的作用,是检查待调度 Pod 与 Node 上的已有 Pod 之间的亲密(affinity)和反亲密(anti-affinity)关系
|
||||
|
||||
**在具体执行的时候, 当开始调度一个 Pod 时,Kubernetes 调度器会同时启动 16 个 Goroutine,来并发地为集群里的所有 Node 计算 Predicates,最后返回可以运行这个 Pod 的宿主机列表。**
|
||||
|
||||
> **Goroutine:**go语言的“线程”,比传统线程对资源的占用更合理
|
||||
|
||||
在 Predicates 阶段完成了节点的“过滤”之后,Priorities 阶段的工作就是为这些节点打分。这里打分的范围是 0-10 分,得分最高的节点就是最后被 Pod 绑定的最佳节点。
|
||||
|
||||
Priorities 里最常用到的一个打分规则,是 LeastRequestedPriority。它的计算方法,可以简单地总结为如下所示的公式:
|
||||
|
||||
~~~
|
||||
score = (cpu((capacity-sum(requested))10/capacity) + memory((capacity-sum(requested))10/capacity))/2
|
||||
~~~
|
||||
|
||||
这个算法实际上就是在选择空闲资源(CPU 和 Memory)最多的宿主机。
|
||||
|
||||
与 LeastRequestedPriority 一起发挥作用的,还有 BalancedResourceAllocation。它的计算公式如下所示:
|
||||
|
||||
~~~
|
||||
score = 10 - variance(cpuFraction,memoryFraction,volumeFraction)*10
|
||||
~~~
|
||||
|
||||
每种资源的 Fraction 的定义是 :Pod 请求的资源 / 节点上的可用资源。而 variance 算法的作用,则是计算每两种资源 Fraction 之间的“距离”。而最后选择的,则是资源 Fraction 差距最小的节点。
|
||||
|
||||
**也就是调度完成后,所有节点里各种资源分配最均衡的那个节点,从而避免一个节点上 CPU 被大量分配、而 Memory 大量剩余的情况**
|
||||
|
||||
此外,还有 NodeAffinityPriority、TaintTolerationPriority 和 InterPodAffinityPriority 这三种 Priority。这里就不一一介绍了,除了默认的调度策略,还有很多默认不会开启的策略,可以通过为 kube-scheduler 指定一个配置文件或者创建一个 ConfigMap ,来配置哪些规则需要开启、哪些规则需要关闭。并且,还可以通过为 Priorities 设置权重,来控制调度器的调度行为。
|
||||
|
||||
|
||||
|
||||
### 调度器的优先级与强制机制
|
||||
|
||||
工作中我们也需要一些Pod有优先级和抢占机制,比如Pod调度失败后,会被“搁置”,知道Pod被更新或集群状态发生变化,调度器才会对Pod进行重新调度,我们希望高优先级的Pod调度失败后不被搁置,而“挤走”某些低优先级的。
|
||||
|
||||
1.11版本后这个特性已经是Beta,用法如下:
|
||||
|
||||
先在Kubernetes里提交一个PriorityClass,如下:
|
||||
|
||||
~~~
|
||||
apiVersion: scheduling.k8s.io/v1beta1
|
||||
kind: PriorityClass
|
||||
metadata:
|
||||
name: high-priority
|
||||
value: 1000000
|
||||
globalDefault: false
|
||||
description: "This priority class should be used for high priority service pods only."
|
||||
~~~
|
||||
|
||||
> 这个YAML文件名为:high-priority
|
||||
>
|
||||
> **value:**值越大代表优先级越高(最大1000000000/10亿)
|
||||
>
|
||||
> **globalDefault:**声明使用该PriorityClass的Pod拥有值为1000000 的优先级,没有声明则为0。 true 的话,那就意味着这个 PriorityClass 的值会成为系统的默认值
|
||||
|
||||
然后我们在Pod就可以声明使用,如下:
|
||||
|
||||
~~~
|
||||
apiVersion: v1
|
||||
kind: Pod
|
||||
metadata:
|
||||
name: nginx
|
||||
labels:
|
||||
env: test
|
||||
spec:
|
||||
containers:
|
||||
- name: nginx
|
||||
image: nginx
|
||||
imagePullPolicy: IfNotPresent
|
||||
priorityClassName: high-priority
|
||||
~~~
|
||||
|
||||
> 提交后,Kubernetes 的 PriorityAdmissionController 就会自动将这个 Pod 的 spec.priority 字段设置为 1000000
|
||||
|
||||
调度器里维护着一个调度队列,高优先级的 Pod 就可能会比低优先级的 Pod 提前出队,从而尽早完成调度过程。**这个过程,就是“优先级”这个概念在 Kubernetes 里的主要体现。**
|
||||
|
||||
而当一个高优先级的 Pod 调度失败的时候,调度器的抢占能力就会被触发。这时,调度器就会试图从当前集群里寻找一个节点,使得当这个节点上的一个或者多个低优先级 Pod 被删除后,待调度的高优先级 Pod 就可以被调度到这个节点上。**这个过程,就是“抢占”这个概念在 Kubernetes 里的主要体现。**
|
||||
|
||||
|
||||
|
||||
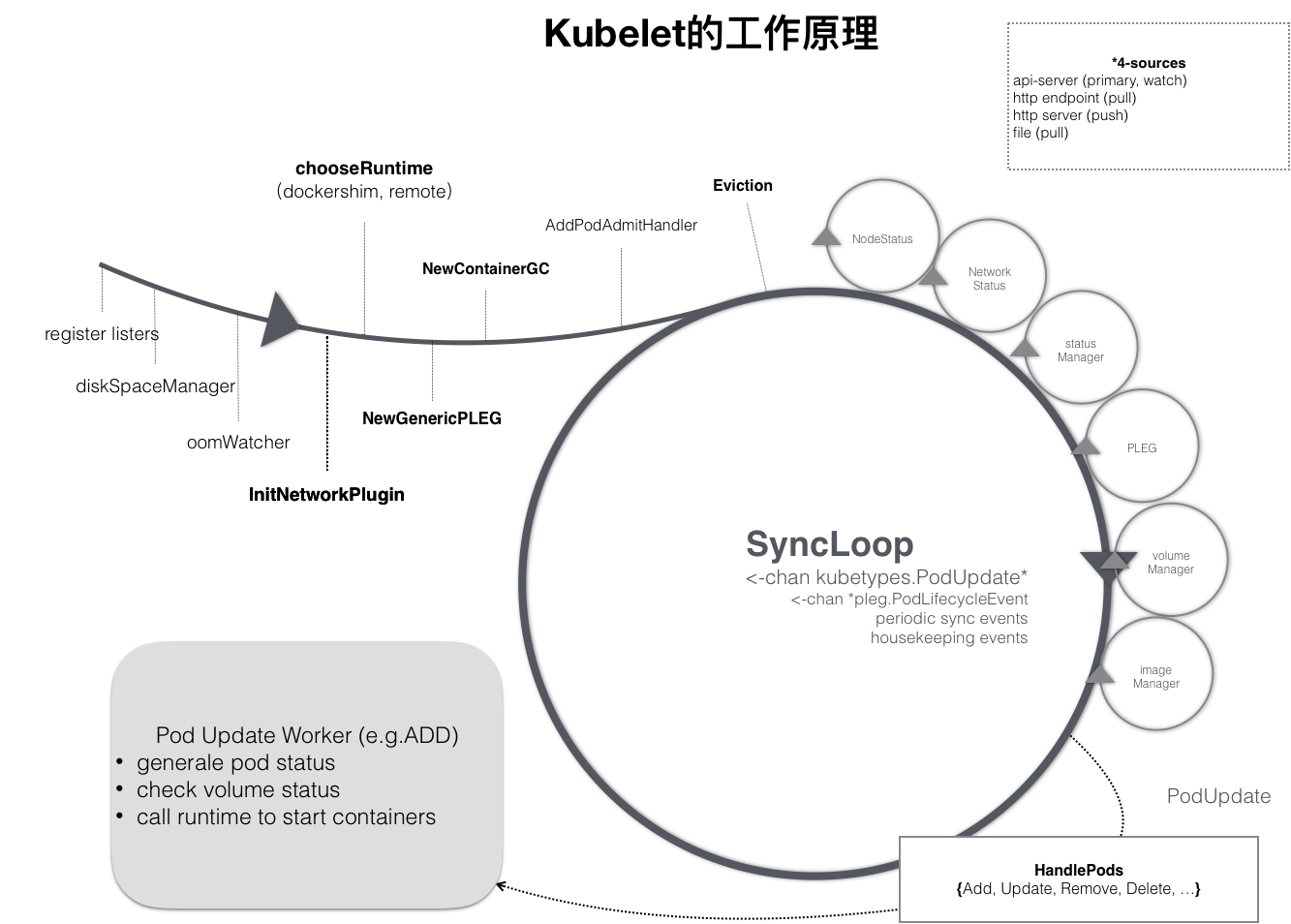
### kubelet
|
||||
|
||||
|
||||
|
||||
**kubelet 调用下层容器运行时的执行过程,并不会直接调用 Docker 的 API,而是通过一组叫作 CRI(Container Runtime Interface,容器运行时接口)的 gRPC 接口来间接执行的。**为什么由CRI来间接执行是关乎历史原因,搭配CRI之后,Kubernetes 以及 kubelet 本身的架构,就可以用如下所示的一幅示意图来描述。
|
||||
|
||||

|
||||
|
||||
可以看到,当 Kubernetes 通过编排能力创建了一个 Pod 之后,调度器会为这个 Pod 选择一个具体的节点来运行,比如创建一个Pod。此时,kubelet 实际上就会调用一个叫作 GenericRuntime 的通用组件来发起创建 Pod 的 CRI 请求。如果使用容器项目是 Docker 的话,那么负责响应这个请求的就是一个叫作 dockershim 的组件。它会把 CRI 请求里的内容拿出来,然后组装成 Docker API 请求发给 Docker Daemon。
|
||||
|
||||
**CRI 这个接口的定义**如下图
|
||||
|
||||

|
||||
|
||||
- 第一组,是 RuntimeService。它提供的接口,主要是跟容器相关的操作。比如,创建和启动容器、删除容器、执行 exec 命令等等。
|
||||
- 而第二组,则是 ImageService。它提供的接口,主要是容器镜像相关的操作,比如拉取镜像、删除镜像等等。
|
||||
|
||||
**CRI 设计的一个重要原则,就是确保这个接口本身,只关注容器,不关注 Pod**
|
||||
|
||||
**第一**,Pod 是 Kubernetes 的编排概念,而不是容器运行时的概念。所以,我们就不能假设所有下层容器项目,都能够暴露出可以直接映射为 Pod 的 API。
|
||||
|
||||
**第二**,如果 CRI 里引入了关于 Pod 的概念,那么接下来只要 Pod API 对象的字段发生变化,那么 CRI 就很有可能需要变更。而在 Kubernetes 开发的前期,Pod 对象的变化还是比较频繁的,但对于 CRI 这样的标准接口来说,这个变更频率就有点麻烦了。
|
||||
|
||||
所以,在 CRI 的设计里,并没有一个直接创建 Pod 或者启动 Pod 的接口。
|
||||
|
||||
|
||||
Loading…
x
Reference in New Issue
Block a user